EXERCISE 6 – BOTTLING PLANT
FIGURE 6 shows a graphic of the Bottling Plant Simulation. It represents the area where the bottles are filled and then sent on to the packing area. The object of this assignment is to write a program that will control the bottling plant simulation. The program should be fully documented.
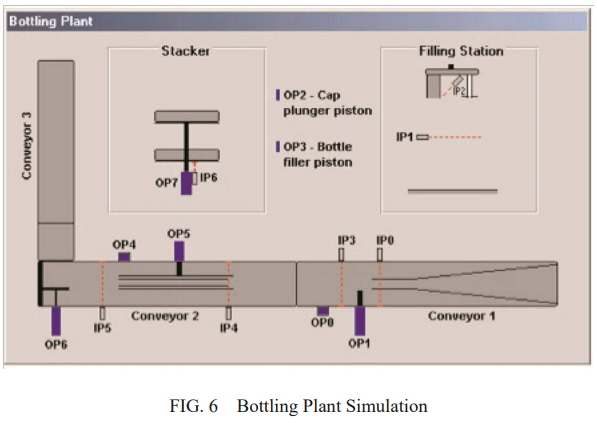
The Inputs and Outputs are listed below:
IP0 Bottle stop sensor OP0 Conveyor 1
IP1 level sensor OP1 Stop bottle piston
IP2 Sol 4 limit switch OP2 Cap plunger piston
IP3 Bottle clear OP3 Bottle filler piston
IP4 Bottle in winder sensor OP4 Conveyor 2
IP5 Counter sensor OP5 Cap winder piston
IP6 Stacker piston limit switch OP6 Stacker piston
OP7 Stacker to conveyor 3
A little thought must first be given to understanding the bottling process. With reference to FIGURE 6, conveyor 1 runs continuously and is fed one bottle at a time. Each bottle travels along the conveyor and is guided to the position where it is filled and capped. A sensor, IP0, detects when the bottle reaches the position and a piston controlled by OP1 is activated and stops the bottle. With the bottle in this position, the filler nozzle piston is activated by OP3 which pushes the nozzle into the neck of the bottle. As it goes into the bottle, a valve automatically opens allowing the liquid to be released into the bottle. This is simulated in the ‘Filling Station’ section.
When the liquid in the bottle activates the level sensor IP1, OP3 de-activates, lifting the nozzle out of the bottle. A few seconds after the nozzle has cleared the bottle, the cap plunger piston OP2 activates, pushing a cap on to the bottle. At the end of the piston travel is a limit switch IP2 which operates as the cap is placed on the bottle. This switch de-activates OP2 retracting the piston and leaving the cap on the bottle. It also de-activates OP1 releasing the bottle stop piston. IP3 will see the bottle as it leaves the filling area.
At this point the cap just rests on the filled bottle and must still be screwed tight. To achieve this, the bottle passes onto conveyor 2 where it is guided into the ‘cap winder’ area. As it enters this area, a sensor (IP4) detects its presence and this activates the cap winder piston via OP5. The operation of this piston closes the guide just enough to put pressure on one side of the cap and, as the bottle travels down the conveyor; this causes the cap to rotate and tighten on the bottle.
When the bottle reaches the end of conveyor 2 it activates the Counter Sensor IP5. This sensor has three functions:
1. It deactivates the cap winder piston OP5.
2. It counts the number of bottles onto the Stacker.
3. When three bottles have passed onto the stacker it operates the stacker piston via OP6 and this pushes the three bottles clear to allow the next three bottles onto the stacker.
When 9 bottles are on the stacker it will operate the piston OP7, which lowers the stacker platform to conveyor 3 as shown in the stacker section of the FIGURE 6. At this point, the 9 bottles are pushed onto conveyor 3 but the operation of this, and conveyor 2, is taken care of automatically so it is not the concern of your program.
When the stacker piston extends it operates a limit switch at the end of its travel
de-activating the piston.
Students succeed in their courses by connecting and communicating with an expert until they receive help on their questions

Consult our trusted tutors.








 Login | Sign Up
Login | Sign Up

