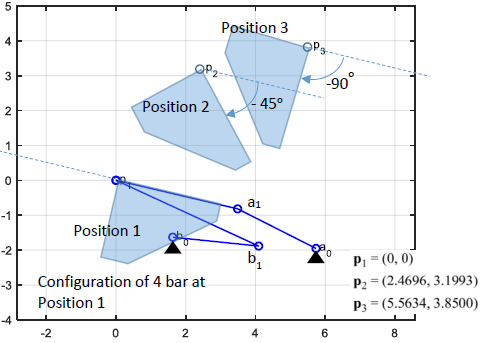
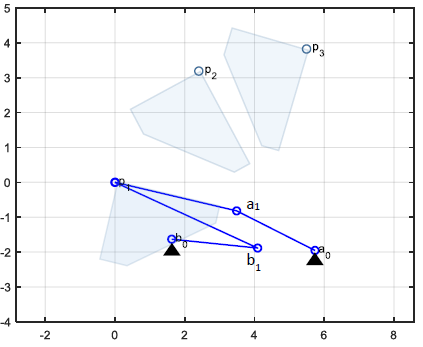
7. Synthesize a planar four bar mechanism for the three positions of the bucket shown below. As shown below, the diagram shows only the configuration for the position 1. Complete link configuration of the position 2 and 3 for β2 = −30º, β3 = −40º, γ2 = 20º, γ3 = 40º when the associated coupler link attached to the bucket has rotations of α2 = −45º, α3 = −90º. You can either sketch it by hand using calculated data or plot them by Matlab.
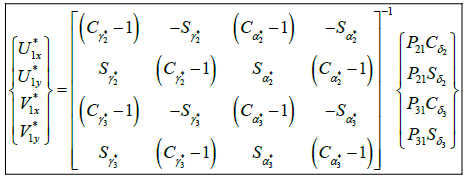
8. Derive the following equation in Lecture 13 Stephenson III mechanism synthesis by repeating the derivation for P31.
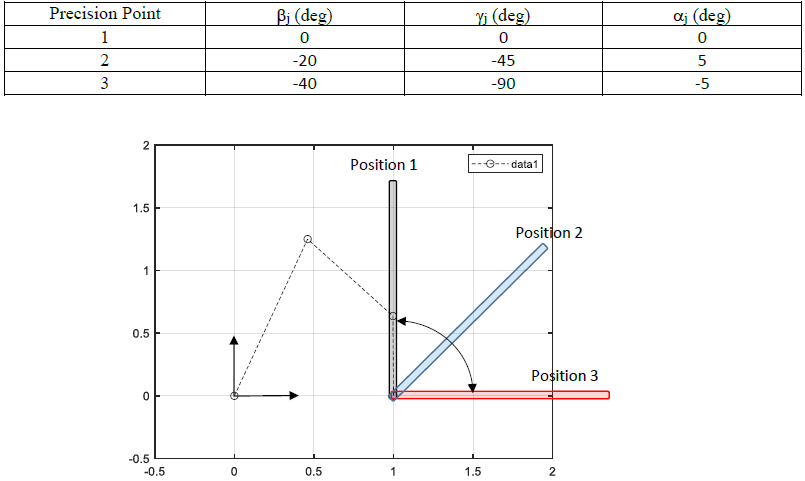
9. Synthesize a planar four-bar mechanism for a 90 deg CW total rotation range of the follower link and a 60 deg CW crank rotation as shown below. Validate your answer by sketching three precision positions with each link configurations. Use Gj=[1 0]. You can modify any of Matlab programs posted on Webcampus under Lecture 14.
Students succeed in their courses by connecting and communicating with an expert until they receive help on their questions

Consult our trusted tutors.








 Login | Sign Up
Login | Sign Up

