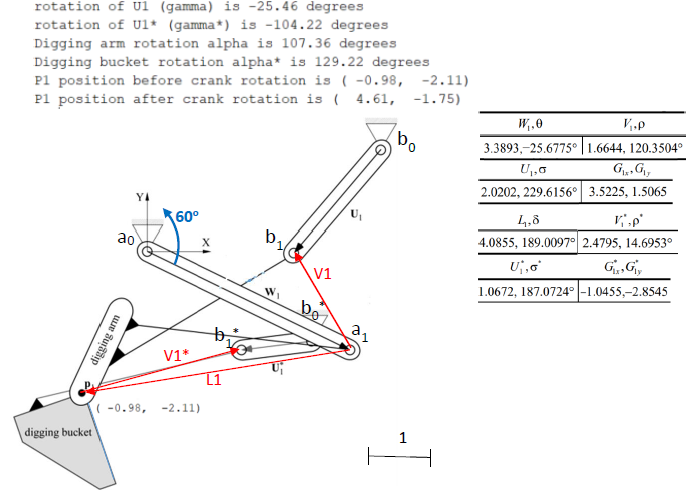
1. The following diagram illustrates a Stephenson III mechanism used to guide a digging tool. The dimensions for the illustrated mechanism is shown in the table below. In the diagram only vectors, W1 and U1 are given. Add remaining vectors of V1, G1, L1, V1*, G1*, U1* in the mechanism diagram below.

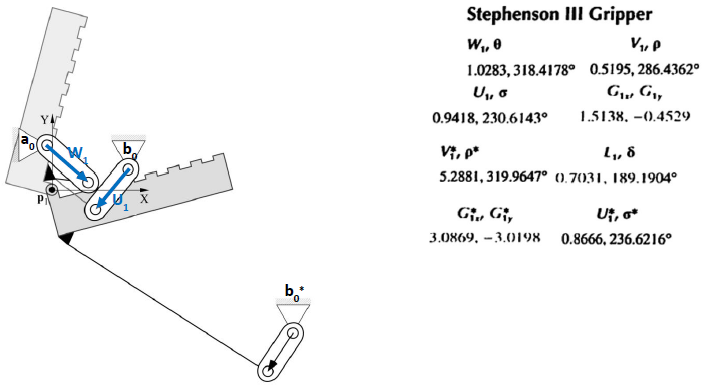
2. Repeat Problem 1 for the following Stephenson III mechanism applied for the gripper.
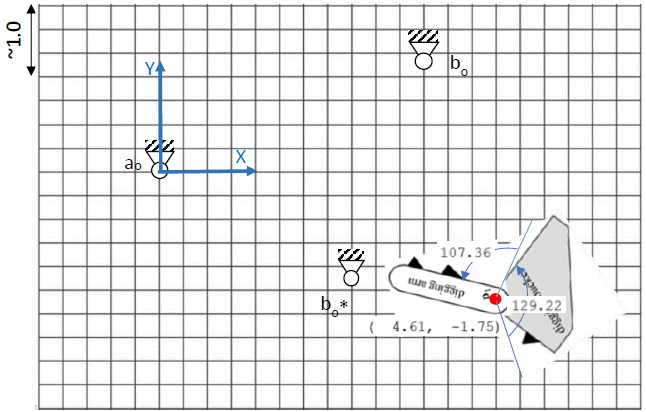
3. For the Stephenson III mechanism used to guide a digging tool, sketch the configuration of mechanism after the crank rotates 60 degrees CCW. The following is the link rotation values solved by Matlab when the crank rotates 60 degrees CCW. The digging arm and bucket positions are provided and you need to sketch corresponding link configuration in the space provided below using hinge positions, a1, b1, b1* after crank rotation from the data provided below. Be sure to add link names of W1, V1, etc. in your sketch.
Students succeed in their courses by connecting and communicating with an expert until they receive help on their questions

Consult our trusted tutors.








 Login | Sign Up
Login | Sign Up

